
Зарождение идеи о работе двигателя постоянного тока (ДПТ) появилось в начале XIX века. Известные физики Алессандро Вольта, М. Фарадей и П. Барлоу внесли в историю своё видение этого процесса. Изобретателем электромотора по праву принято считать Б. С. Якоби, ведь именно ему удалось изготовить устройство с вращающимся якорем, которое можно было применить на практике. Хотя первый двигатель был маломощным, но следующий уже приводил в движение лодку.
Устройство ДПТ
Основными частями электрической машины постоянного тока являются магниты и обмотка. К вспомогательным частям относятся корпус, сердечник, вал, коллектор, щёточный механизм. Все эти детали имеют своё назначение.
Сердечники подвижной и неподвижной частей изготавливаются не из целостной конструкции, а из листов электротехнической стали. Эта особенность строения даёт возможность практически устранить вихревые токи.
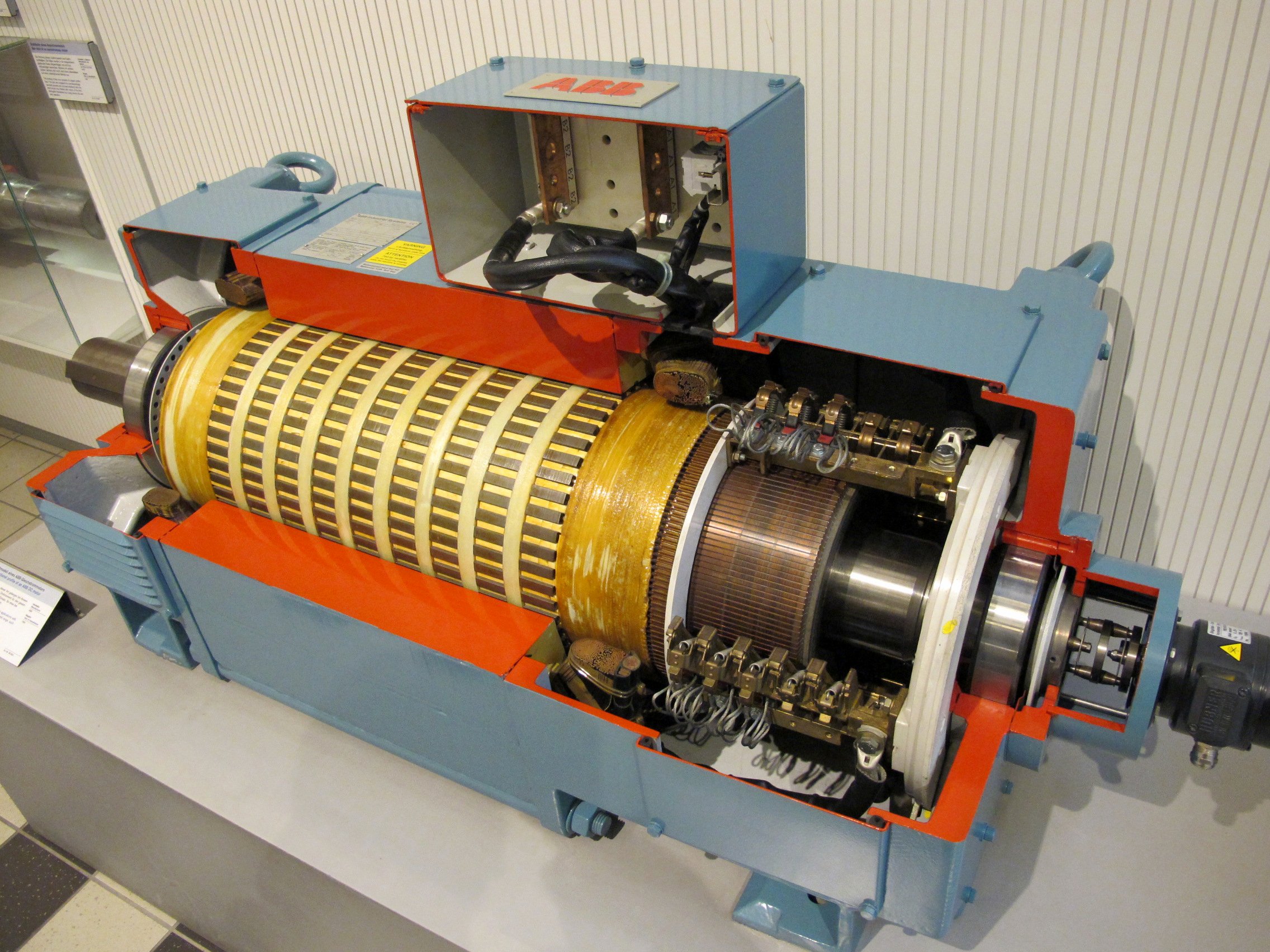
Прямой обязанностью коллектора является преобразование переменного тока, который вырабатывается в обмотке якоря, в постоянный. Коллектор — узел, характерный именно для машин постоянного тока. Но он одновременно и самый уязвимый, так как почти половина всех электромоторов выходит из строя в процессе работы именно по причине его поломки. Отсутствие коллектора в строении асинхронной или синхронной машины улучшает её надёжность. Это преимущество сохраняется как для трехфазных, так и для однофазных машин переменного тока.
Управление двигателем постоянного тока подразумевает изменение скорости его вращения, ведь основной его задачей является приведение в ход рабочих механизмов. Скорость вращения можно изменять тремя методами:
- изменением напряжения, которое подводится;
- изменением сопротивления в цепи якоря;
- изменением магнитного потока в цепи возбуждения.
Классификация моторов ПТ
Различия между видами электромоторов заключаются в типе магнитов и способе возбуждения. Магниты могут быть как постоянными, так и электромагнитами. Преимущества постоянного магнита (в отличие от электромагнита):
- компактность;
- не требует источника энергии для работы.
Недостатками являются невозможность регулировки силы магнитного потока и размагничивание с течением времени.
Вид возбуждения ДПТ зависит от места присоединения обмотки полюсов. В связи с этим различают независимое возбуждение мотора (обмотка возбуждения питается от постороннего источника) и самовозбуждение (обмотка возбуждения присоединена к обмотке якоря). Двигатели с самовозбуждением носят более короткие названия:
- шунтовые (параллельное соединение обмоток);
- сериесные (последовательное соединение обмоток);
- компаундные (смешанное соединение обмоток).
Электромоторы применяются в различных областях промышленности и сельского хозяйства, а также бытовых установках. Их разнообразие велико. Основные типы ДПТ:
- традиционного назначения;
- специального назначения.
Особенности работы вентильных двигателей
Вентильные двигатели относятся к электрическим машинам специального назначения. Своим названием они обязаны применению в них устройств для выпрямления тока — вентилей. Достоинства вентильных электродвигателей:
- изменение скорости вращения в широких пределах;
- более высокий коэффициент полезного действия из-за уменьшения магнитных потерь вследствие малого магнитного сопротивления;
- даже при пиковой нагрузке рабочие характеристики довольно неплохи.
Наряду с преимуществами, они имеют и некоторые недостатки. Но значение их не велико. Основными являются:
- шумность;
- управление требует определённой квалификации обслуживающего персонала;
- высокая цена.
 Области применения их различны: на производстве по добыче нефти, в химической промышленности и установках для бурения скважин.
Области применения их различны: на производстве по добыче нефти, в химической промышленности и установках для бурения скважин.
Основная разница между вентильным и обычным двигателем заключается в конструкции. У вентильного нет некоторых привычных частей конструкции: коллектора и щёточного механизма. Вместо этого установлен коммутатор (инвертор), с помощью которого осуществляется управление вентильным двигателем. На инвертор поступает сигнал от датчика положения ротора.
Датчиками положения ротора могут быть трансформаторные или индуктивные бесконтактные элементы. Наиболее распространёнными являются датчики электродвижущей силы Холла. Такое устройство состоит из небольшой пластины полупроводникового материала. На ней находятся контактные звенья, к которым припаяны выводы, соединённые с источником питания. Выводы выходного сигнала также припаиваются к соответствующим звеньям пластины. Требованиями к датчикам положения ротора являются:
- компактность;
- минимальное значение мощности на входе;
- большая кратность сигнала как максимального, так и минимального;
- надёжная работа при любых условиях окружающей среды.
 Коммутатор выполнен на полупроводниках. Его задача аналогична задаче щёточно-коллекторного узла в обычных двигателях и заключается в изменении направления тока. На сердечнике станины находится обмотка якоря, а на роторе — постоянный магнит. Такая конструкция устраняет возможность скольжения контакта на якоре.
Коммутатор выполнен на полупроводниках. Его задача аналогична задаче щёточно-коллекторного узла в обычных двигателях и заключается в изменении направления тока. На сердечнике станины находится обмотка якоря, а на роторе — постоянный магнит. Такая конструкция устраняет возможность скольжения контакта на якоре.
У вентильного двигателя ток в фазах синусоидального вида. Возбуждение у него может быть двух видов:
- электромагнитное;
- магнитоэлектрическое.
При электромагнитном возбуждении обмотка возбуждения располагается на полюсах. Она подключается к сети благодаря контактным кольцам, размещённым на валу ротора. Таким образом, создание магнитного поля происходит электромагнитным путём.
В случае магнитоэлектрического возбуждения ни в цепи возбуждения, ни в якорной цепи скользящего контакта не будет. Постоянные магниты будут выступать в качестве полюсов. Эти двигатели называются бесколлекторными электродвигателями.
Свойства бесколлекторных приборов
 Бесколлекторный двигатель постоянного тока (БДПТ) существенно отличается от вентильного двигателя. Его ток в фазах выглядит трапецеидально. БДПТ устроен более просто: широтно-импульсная модуляция заменена на коммутацию 120 или 180 градусов. Главными задачами безщеточного двигателя является точное положение ротора в необходимом промежутке и высокая скорость вращения.
Бесколлекторный двигатель постоянного тока (БДПТ) существенно отличается от вентильного двигателя. Его ток в фазах выглядит трапецеидально. БДПТ устроен более просто: широтно-импульсная модуляция заменена на коммутацию 120 или 180 градусов. Главными задачами безщеточного двигателя является точное положение ротора в необходимом промежутке и высокая скорость вращения.
Конструкция может быть двух видов: с магнитами на подвижной части (якоре) или неподвижной (статоре). В устройствах автоматики для охлаждения используются приводы с конструкцией магнитов на якоре. Характерной их особенностью является быстрое достижение высоких оборотов.
 В системах оборудования для медицины распространено размещение магнитов на статоре. Эти микромашины называются высокомоментными двигателями. Скорость вращения у них не столь велика, но из-за отсутствия обмотки возбуждения и наличия постоянных магнитов они неплохо справляются с работой при перегрузках и сохраняют точность позиции в пространстве.
В системах оборудования для медицины распространено размещение магнитов на статоре. Эти микромашины называются высокомоментными двигателями. Скорость вращения у них не столь велика, но из-за отсутствия обмотки возбуждения и наличия постоянных магнитов они неплохо справляются с работой при перегрузках и сохраняют точность позиции в пространстве.
Сигнал на обмотки таких электромашин будет поступать от драйвера, задачей которого является управление вращающим моментом. Для того чтобы якорь повернулся на определённый угол, необходимо подать на нужные обмотки напряжение. Плавность вращения сохранить не удастся, но высокой скорости вращения добиться можно.
Разница между коллекторными и бесколлекторными двигателями состоит как в строении, так и в процессе работы. В контроллере коллекторные двигатели не нуждаются, а вот работа бесщеточного мотора без его участия недопустима. Достоинства бесщеточных двигателей:
- возможность работы в условиях с различными характеристиками окружающей среды;
- длительный срок использования;
- надёжность в работе.
 Недостатком является стоимость. Она довольно высока из-за наличия в строении полупроводникового коммутатора, постоянного магнита и чувствительных элементов.
Недостатком является стоимость. Она довольно высока из-за наличия в строении полупроводникового коммутатора, постоянного магнита и чувствительных элементов.
Собрать вентильный или ДПТ своими руками — дело неблагодарное. Материалы, сложность работы и потраченное время будут стоить гораздо дороже, нежели потраченные средства на покупку двигателя заводского изготовления. Но надёжность и безопасность тоже будут в несколько раз выше.
Подбор этих электромашин необходимо проводить, опираясь на характеристики драйверов с каналами широтно-импульсной модуляции:
- предельное напряжение при длительном использовании;
- максимальная скорость вращения;
- допустимая сила тока;
- частота тока (обыкновенные устройства 7—8 кГц, более усовершенствованные модели — 16—32 кГц).
 Главными звеньями при управлении бесколлекторным двигателем являются датчики положения. Сигнал с них передаётся на контроллер, и вследствие этого происходят переключения. Но возможна работа этих устройств и без датчиков. В этом случае играет роль перепад напряжения на обмотке, которая в определённый момент является нерабочей.
Главными звеньями при управлении бесколлекторным двигателем являются датчики положения. Сигнал с них передаётся на контроллер, и вследствие этого происходят переключения. Но возможна работа этих устройств и без датчиков. В этом случае играет роль перепад напряжения на обмотке, которая в определённый момент является нерабочей.
По количеству фаз многие моторы являются трехфазными, и для управления ими необходим дополнительный узел в устройстве — выпрямитель постоянного тока в трехфазный импульсный. Управление трехфазным бесщеточным двигателем постоянного тока также вызывает некоторые сложности из-за параллельного контроля нескольких параметров. Поскольку электрические машины устройства обратимые, то бесколлекторный мотор можно подключить как генератор.
Строение шагового типа оборудования
Разновидностью двигателей переменного тока специального назначения являются шаговые. Их иногда называют импульсными. Они относятся к синхронным электромоторам специального назначения. Принцип их работы состоит в том, что скачкообразные шаги на выходе получают благодаря импульсам напряжения на входе. Виды шаговых двигателей по виду ротора:
- возбуждённые;
- реактивные.
Строение устройства с активным ротором предполагает наличие в нём электромагнитов или постоянных магнитов. В двигателях с реактивным ротором обмотки возбуждения нет. Ротор изготавливается из магнитомягкого материала.
Обмотка управления находится на неподвижной части — статоре. По количеству фаз она может быть разной, но наиболее распространёнными являются трехфазные обмотки.
Принцип действия
 Если у шагового двигателя на статоре имеется две пары полюсов с двумя обмотками управления, то его вращение будет зависеть от подачи напряжения на обмотку управления. При подаче сигнала на обмотку управления, которая находится на первой паре, ротор повернётся и займёт положение по ее оси. Когда на обмотке второй пары полюсов появится сигнал, ротору придётся занять положение между этими полюсами.
Если у шагового двигателя на статоре имеется две пары полюсов с двумя обмотками управления, то его вращение будет зависеть от подачи напряжения на обмотку управления. При подаче сигнала на обмотку управления, которая находится на первой паре, ротор повернётся и займёт положение по ее оси. Когда на обмотке второй пары полюсов появится сигнал, ротору придётся занять положение между этими полюсами.
При отключении сигнала на обмотке первой пары и оставшемся сигнале на обмотке управления второй пары полюсов ротор повернётся на их ось. Таким образом, при вращении он как будто будет совершать шаги, поэтому и носит такое название. Шаги двигателя (угол поворота ротора) с двумя парами полюсов будут равняться 45 градусам. Система коммутации будет четырехтактной.
Для двухтактной системы коммутации при таком же количестве пар полюсов необходимо, чтобы сигнал поступал всегда только на одну определённую обмотку управления конкретной пары полюсов. Тогда и угол поворота ротора изменится и будет составлять 90 градусов.
Чтобы принцип работы шагового двигателя был понятен даже для чайников, необходимо обратить внимание на схему.

Ротор будет занимать положение в пространстве против той пары полюсов, на обмотке которой будет подано питание. Если же питание подано две на обмотки соседних полюсов, ротор займёт положение между ними. Чем меньше значение шага двигателя, тем точнее и устойчивее его работа.
Для работы шагового двигателя необходим коммутатор. Его задачей является превращение импульсов управления определённой последовательности в прямоугольные импульсы в системе с необходимым количеством фаз.
При большой нагрузке на двигатель точность поворота ротора будет нарушена. Он будет поворачиваться с некоторым отставанием, которое является углом статической ошибки. При холостом ходе шагового двигателя значение угла статической ошибки равно нулю.
Так как скорость протекания процессов работы обратно пропорциональна сопротивлению управляющих обмоток, то для того, чтобы ускорить вращение ротора, применяются резисторы. Их присоединяют последовательно в цепь управляющих обмоток статора. Оценивают экономичность работы по основному показателю — значению мощности на входе.


